Assembling Pi
B.2 Erweiterungen der CPU-Funktionalität
2.4.4 Grafik & GPU: Kommunikation mittels Mailbox
Um über die Mailbox zwischen GPU und CPU Daten austauschen zu können werden zunächst zwei Funktionen benötigt. Eine, um damit der ARM-Prozessor Daten senden kann, MailboxWrite - und eine weitere, damit er Daten in Empfang nehmen kann, MailboxRead.
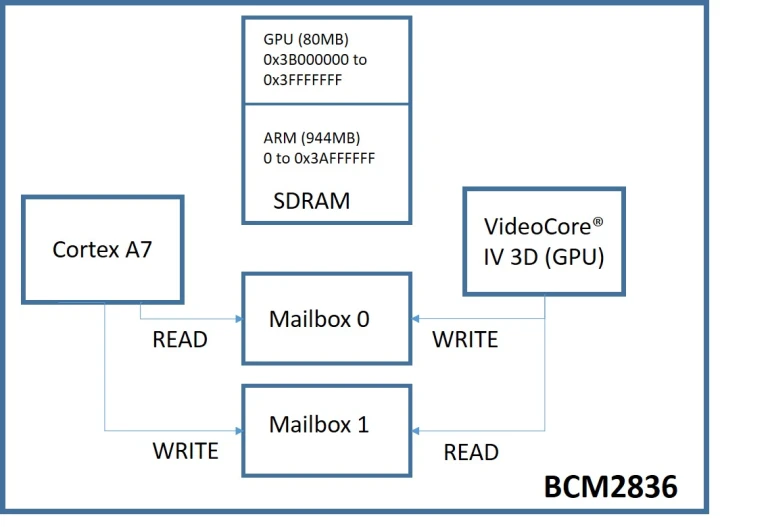
MailboxWrite: Sende Nachricht an Mailbox 1
Der Absender wartet, bis das Statusfeld im most significant Bit eine 0 anzeigt. Anschließend schreibt der Absender seine Mail in das Schreibregister (MAILBOX_WRITE), wobei die unteren 4 Bits die Nummer des Kanals angeben, in den geschrieben werden soll, und die oberen 28 Bits die Nachricht enthalten, die gesendet werden soll.
MailboxRead: Lese Nachricht von Mailbox 0
Der Empfänger wartet, bis das Statusfeld im 30. Bit eine 0 anzeigt. Danach liest der Empfänger aus dem Leseregister. Anschließend überprüft er, ob die Nachricht für das richtige Postfach bestimmt ist. Ist dies nicht der Fall, wiederholt er den Vorgang.
Fehlerbehandlung
Zudem ist es ratsam eine Fehlerbehandlung vorzunehmen, bei der sich die Funktionen bei Problemen vorzeitig beenden, indem sie mit einem Fehlercode als Rückgabewert zur Rücksprungadresse zurückkehren.
Implementierung von Mailboxwrite & Mailboxread
Der folgende Code implementiert die Funktionen zur Kommunikation zwischen CPU und GPU über die Mailbox:
MailboxWrite: Schreibt eine Nachricht in die GPU-Mailbox.MailboxRead: Liest eine Nachricht aus der GPU-Mailbox.
Speichern Sie diesen Code in gpu_mail.s
Deklarationen und Definitionen
.global MailboxWrite
.global MailboxRead
.section .text
.equ MailboxBaseAdr, 0x3f00b880
.equ MB_READ, 0x00
.equ MB_STATUS_WRITE, 0x38
.equ MB_WRITE, 0x20
.equ MB_STATUS_READ, 0x18
.equ channel_mask, 0x0f
.equ MAIL_FULL, 0x80000000
.equ MAIL_EMPTY, 0x40000000
Die globalen Symbole MailboxWrite und MailboxRead werden deklariert, sodass sie von anderen Modulen oder Funktionen aufgerufen werden können.
Mehrere Konstanten werden mit .equ definiert. MailboxBaseAdr gibt die Basisadresse der Mailbox-Register an, die für die Kommunikation mit der GPU bei 0x3F00B880 liegt. Die Offsets MB_READ, MB_STATUS_WRITE, MB_WRITE und MB_STATUS_READ spezifizieren die Positionen der entsprechenden Register für das Lesen, Schreiben und Statusabfragen.
Die Maske channel_mask dient dazu, die unteren 4 Bits zu verwenden, um die Kanalnummer festzulegen. Mit MAIL_FULL wird eine Bitmaske (0x80000000) definiert, die anzeigt, ob die Mailbox voll ist und somit keine Daten geschrieben werden können. MAIL_EMPTY ist eine weitere Bitmaske (0x40000000), die verwendet wird, um festzustellen, ob die Mailbox leer ist, bevor Daten gelesen werden können.
Funktion MailboxWrite
MailboxWrite:
push {lr}
tst r0, #channel_mask
bne error_exit
cmp r1, #channel_mask
bhi error_exit
mov r2, r0
ldr r0, =#MailboxBaseAdr
wait_write:
ldr r3, [r0, #MB_STATUS_WRITE]
tst r3, #MAIL_FULL
bne wait_write
wait_write_end:
add r2, r1
str r2, [r0, #MB_WRITE]
pop {pc}
Erläuterung der Funktion MailboxWrite:
Das Link-Register wird zunächst gesichert, um die Rücksprungadresse nach dem Funktionsaufruf wiederherstellen zu können. Anschließend erfolgt eine Validierung der Eingabeparameter. Zuerst wird überprüft, ob die Kanalbits der Nachricht in r0 korrekt sind. Die unteren 4 Bits müssen Null sein, andernfalls springt die Funktion zur Fehlerbehandlung. Die Kanalnummer, die in r1 übergeben wird, wird ebenfalls geprüft, um sicherzustellen, dass sie innerhalb des gültigen Bereichs der unteren 4 Bits liegt. Ist einer der Werte ungültig, verzweigt die Funktion ebenfalls zur Fehlerbehandlung.
Nach der Validierung wird die Nachricht aus r0 in r2 kopiert, und die Basisadresse der Mailbox-Register wird in r0 geladen. Anschließend geht die Funktion in eine Warteschleife, die so lange aktiv bleibt, bis die Mailbox bereit zum Schreiben ist. Diese Prüfung erfolgt durch das Lesen des Mailbox-Statusregisters und dem Testen des MAIL_FULL-Bits. Solange die Mailbox voll ist, bleibt die Schleife aktiv.
Sobald die Mailbox zum Schreiben bereit ist, wird die Kanalnummer zu der Nachricht in r2 hinzugefügt, wobei die Kanalnummer korrekt in die unteren 4 Bits eingefügt wird. Diese kombinierte Nachricht wird dann in das Schreibregister der Mailbox geschrieben. Schließlich wird das Link-Register wiederhergestellt, und die Funktion kehrt zur aufrufenden Funktion zurück.
Fehlerbehandlung in MailboxWrite
error_exit:
mov r1, #1
pop {pc}
Im Fall eines Fehlers wird r1 auf den Wert 1 gesetzt, um einen Fehlercode zu signalisieren. Anschließend wird das Link-Register vom Stack wiederhergestellt, und die Funktion kehrt mit pop {pc} zum Aufrufer zurück. Dies zeigt an, dass während der Ausführung ein Fehler aufgetreten ist, indem der Fehlercode über r1 übermittelt wird.
Funktion MailboxRead
MailboxRead:
push {lr}
cmp r0, #channel_mask
bhi error_exit
mov r1, r0
ldr r0, =#MailboxBaseAdr
wait_read:
ldr r2, [r0, #MB_STATUS_READ]
tst r2, #MAIL_EMPTY
bne wait_read
wait_read_end:
ldr r2, [r0, #MB_READ]
and r3, r2, #channel_mask
teq r3, r1
bne wait_read
right_channel:
and r0, r2, #0xfffffff0
pop {pc}
Das Link-Register wird gesichert, und die Kanalnummer in r0 mit der Kanalmaske verglichen. Ist die Kanalnummer ungültig, erfolgt ein Sprung zur Fehlerbehandlung.
Die Kanalnummer wird in r1 kopiert, und die Basisadresse der Mailbox-Register in r0 geladen. Anschließend geht die Funktion in eine Warteschleife, bis die Mailbox Daten zum Lesen bereitstellt. Solange das MAIL_EMPTY-Bit gesetzt ist, bleibt die Funktion in der Schleife.
Sobald Daten vorhanden sind, wird die Nachricht aus dem Leseregister geladen und die Kanalnummer extrahiert. Stimmt sie nicht überein, wird weitergewartet. Bei Übereinstimmung wird die Nachricht bereinigt, indem die unteren 4 Bits entfernt werden. Die Funktion kehrt schließlich mit der bereinigten Nachricht in r0 zur aufrufenden Funktion zurück und stellt das Link-Register wieder her.
Fehlerbehandlung in MailboxRead
error_exit:
mov r1, #1
pop {pc}
Im Fall eines Fehlers wird r1 auf den Wert 1 gesetzt, um einen Fehlercode zu signalisieren. Anschließend wird das Link-Register vom Stack wiederhergestellt, und die Funktion kehrt mit pop {pc} zur aufrufenden Funktion zurück. Dies zeigt an, dass während der Ausführung ein Fehler aufgetreten ist, und über den Fehlercode in r1 wird dies dem Aufrufer mitgeteilt.
| zurück | Hauptmenü | weiter |