Assembling Pi
A.3 Verknüpfungen von Basic Blocks
3.2.8 Kontrollstrukturen: Zustandsautomaten
Zustandsautomaten (State Machines) sind in der Programmierung ein wertvolles Werkzeug, um Abläufe strukturiert und übersichtlich darzustellen. Sie bestehen aus einer begrenzten Anzahl von Zuständen, die durch Übergänge verbunden sind. Ein Zustand repräsentiert einen bestimmten Moment im System, in dem bestimmte Aktionen oder Bedingungen gelten. Ein Übergang beschreibt den Wechsel zwischen Zuständen, der auf spezifischen Eingaben oder Bedingungen basiert.
Durch die klare Struktur von Zustandsautomaten können Entwickler Abläufe und Entscheidungslogiken effizient abbilden. Sie finden breite Anwendung, etwa bei der Steuerung von Spieler- und Gegnerverhalten in Videospielen, in Kommunikationsprotokollen oder in der Automobilindustrie zur Motorsteuerung. In Benutzeroberflächen ermöglichen sie die Navigation durch Menüs und Dialoge.
Die Vorteile von Statemachines umfassen Modularität, die das Hinzufügen neuer Zustände vereinfacht, geringe Fehleranfälligkeit durch klar definierte Übergänge und die Wiederverwendbarkeit in verschiedenen Projekten. Zustandsautomaten verbessern zudem die Testbarkeit und Skalierbarkeit der Software, was sie ideal für einfache und komplexe Systeme macht.
| Weiterführende Informationen zu Zustandsautomaten |
Beispiel einer simplen Statemachine in Assembler
Ein einfaches Beispiel für einen Zustandsautomaten verdeutlicht die praktische Umsetzung. Das folgende Beispiel umfasst vier Zustände (state0 bis state2) und zeigt sowohl unbedingte als auch bedingte Zustandsübergänge:
.section .data
current_state: .word state0
.section .text
_start:
statemachine:
ldr r0, =current_state @ Lade die Adresse der aktuellen Zustandsvariable
mov lr, pc @ Speichere die Rücksprungadresse im Link-Register
ldr pc, [r0] @ Lade den nächsten Zustand in den Program Counter
b statemachine @ Endlosschleife
state0:
@ Aktionen für state0
adr r0, state1 @ Setze den nächsten Zustand auf state1
mov r3, #5
ldr r1, =current_state
str r0, [r1] @ Aktualisiere die Zustandsvariable
bx lr @ Rückkehr zur Hauptschleife
state1:
@ Aktionen für state1
adr r0, state2 @ Setze den nächsten Zustand auf state2
sub r3, r3, #1
ldr r1, =current_state
str r0, [r1]
bx lr
state2:
@ Aktionen für state2
cmp r3, #0 @ Vergleiche Register r3 mit 0
adreq r0, state0 @ Wenn gleich, setze nächsten Zustand auf state0
adrne r0, state1 @ Wenn ungleich, setze nächsten Zustand auf state1
ldr r1, =current_state
str r0, [r1]
bx lr
Erläuterung des Beispiels
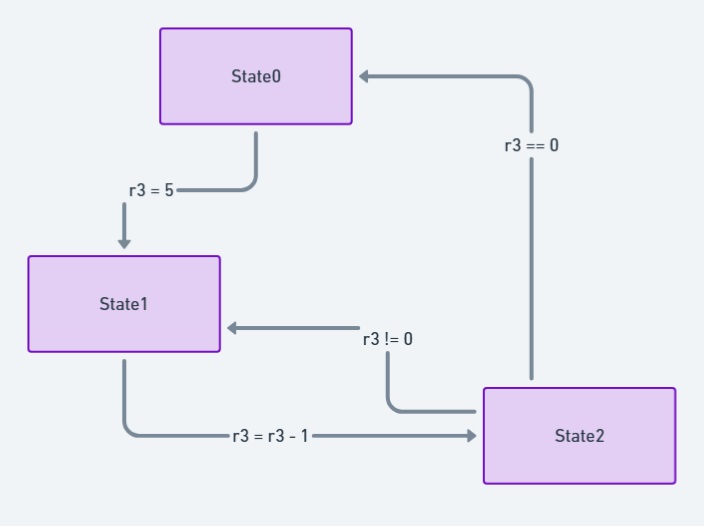
Wie im Diagramm zu sehen ist, implementiert das obige Beispiel einen endlosen Zustandsautomaten mit drei Zuständen:
- state0: Initialisiert einen Zähler auf 5 und wechselt zu state1.
- state1: Dekrementiert den Zähler um eins und wechselt zu state2.
- state2: Prüft den Zähler:
- Ist der Zähler null, wechselt zurück zu state0.
- Andernfalls kehrt er zu state1 zurück.
Dieser Zyklus wiederholt sich kontinuierlich, wobei der Automat bei state0 startet, den Zähler herunterzählt und nach Erreichen von null erneut initialisiert wird.
Erklärung der Implementierung:
Zunächst wird die Zustandsvariable current_state in der Datensektion initialisiert und auf state0 gesetzt. Die Hauptschleife der Zustandsmaschine lädt die Adresse der aktuellen Zustandsvariable, speichert die Rücksprungadresse im Link-Register (lr) und lädt den nächsten Zustand in den Program Counter (pc). Dadurch wird die entsprechende Zustandsroutine aufgerufen, die spezifische Aktionen ausführt und den nächsten Zustand bestimmt. Nach der Ausführung eines Zustands wird zur Hauptschleife zurückgesprungen, wodurch ein endloser Zyklus entsteht.
Jeder Zustand (state0 bis state2) enthält Platzhalter für Aktionen und bestimmt den nächsten Zustand durch Adressierung und Aktualisierung der Zustandsvariable.
| zurück | Hauptmenü | weiter |
| 3.2 Kontrollstrukturen |
|---|
| 3.2.1 Intro |
| 3.2.2 If-not-then |
| 3.2.3 If-elseIf-then |
| 3.2.4 If-then elseif-then |
| 3.2.5 Switch-Case |
| 3.2.6 While-Schleifen |
| 3.2.7 Do-While-Schleifen |
| 3.2.8 Zustandsautomaten |