Assembling Pi
A.3 Verknüpfungen von Basic Blocks
3.2.7 Kontrollstrukturen: Do-While-Schleifen
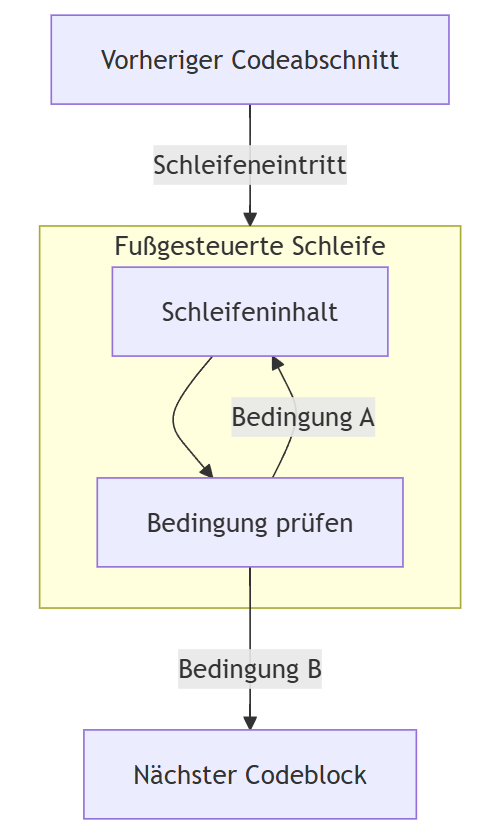
Die do-while-Schleife ist eine fußgesteuerte Schleife, bei der der Schleifeninhalt immer mindestens einmal ausgeführt wird, bevor die Bedingung am Ende geprüft wird. Das bedeutet, dass die Schleife den Block unabhängig von der Bedingung einmal durchläuft und erst danach entscheidet, ob sie erneut ausgeführt wird oder nicht.
Fußgesteuerte Schleife
Pseudocode:
do: i = i + 1 ... while (i < limit)
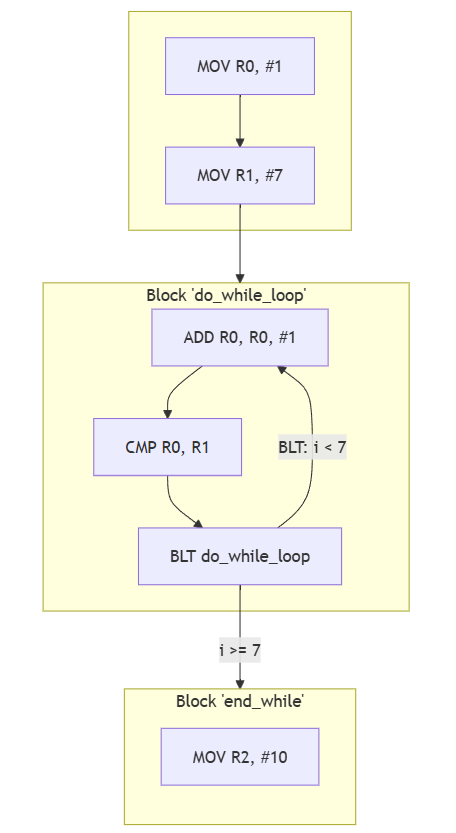
Beispiel in ARM-Assembler:
MOV R0, #1 @ i = 1
MOV R1, #7 @ Setze die Obergrenze (7 für i < 7)
do_while_loop:
ADD R0, R0, #1 @ i++
CMP R0, R1 @ Vergleiche i mit der Obergrenze (R0-R1)
BLT do_while_loop @ Springe zurück, falls i < 7
end_while:
MOV R2, #10 @ Programmende
Im Gegensatz zur normalen while-Schleife wird hier zuerst i um 1 erhöht und dann die Bedingung überprüft. Die Schleife läuft, bis i >= 7 wird. Solange i < 7 ist, wird zum Schleifenanfang do_while_loop zurückgesprungen.
Der Kontrollflussgraph zum Beispiel
| zurück | Hauptmenü | weiter |
| 3.2 Kontrollstrukturen |
|---|
| 3.2.1 Intro |
| 3.2.2 If-not-then |
| 3.2.3 If-elseIf-then |
| 3.2.4 If-then elseif-then |
| 3.2.5 Switch-Case |
| 3.2.6 While-Schleifen |
| 3.2.7 Do-While-Schleifen |
| 3.2.8 Zustandsautomaten |